On Wednesday’s evening, 16th of October we attended a 4th Robotics and ROS in Zurich meetup. I was our first meetup after the summer break. This time, it was co-organized by ICCLab and ANYbotics. ANYbotics provided their office space for the meeting and demo. We managed to gather together around 50 interested attendees.
Everything started with a short introduction talk and agenda presentation by Giovanni Toffetti. After that, the ANYbotics team gave a 30min long presentation about their flagship robot – ANYmal C.

Peter Frankhauser, the CBDO of ANYbotics, started by explaining the current state of the art of mobile robots and presenting possible paths where the robotic industry is going to expand in the future. He showed that by analyzing the history of the mobile robotics industry we can spot a transition from robots performing repetitive tasks (automation), started by the third industrial revolution in late 60s, to autonomous robots used to operate in large storehouses (logistics). The autonomy of logistic robots is somehow limited only to controlled environments, so by drawing a trend line, we can spot the next breakthrough waiting to be reached by mobile robots: the possibility to operate autonomously in “robot unfriendly” environment. The use-case presented by ANYbotics team is the task of routine inspections in places like offshore power plants or oil platforms. Later on, two engineers from ANYbotics, took over the presentation and dived more deeply into technical details about how they managed to adapt their robot to harsh environment and what kind of challenges they faced.
The next part of meetup were Lightning Talks. Four presenters did a 3 min presentations about the projects they are working on. First presentation was done by Jasmine Kent, the CTO of Dufour Aerospace. Her company’s mission is to create a vertical take-off and landing (VTOL) autonomous plane, electrically powered.

Dufour Aerospace is using ROS to control the first 50kg prototype of the aircraft. The company’s long term goal is to create an aircraft which could be used as daily traveling medium and also to be capable of perform a rescue missions.
The second short presentation was from Mateusz Sadowski, a robotics consultant from Geneva who is also the creator of weeklyrobotics.com website, which aggregates interesting news about the robotic world.

In the presentation he focused on promoting his website, as an example of interesting project Mat described in weeklyrobotics was NASA’s Astrobee robot.
After that, Behrooz Tahanzadeh took the scene with his presentation about the Bengesht plugin, acting as a bridge between the visual programming language -Grasshopper and ROS. Recently Behrooz also wrote a blogpost about our meeting, check it out!
The last lightning talk was from Giovanni.

He focused on the one of the projects from ICCLab – Cloud Robotics. He presented the list of challenges the cloud systems need to face while providing resources to mobile robots and how he and his team managed to overcome the problems in their Cloud Robotics Paas (Platform-as-a-Service). The platform which takes care about robot configuration, orchestration and provides computational resources to the robots. Thus allows Robotics Application Developers to focus on providing actual application features for the robots, without being distracted by taking care of underlying infrastructure and robot resources. Usage of cloud tools and development processes gives high modularity, portability and gives self-healing capabilities to the software. Currently ICCLab is looking for opportunities to collaborate in research projects by providing its experience in ROS, robotics and cloud computing.
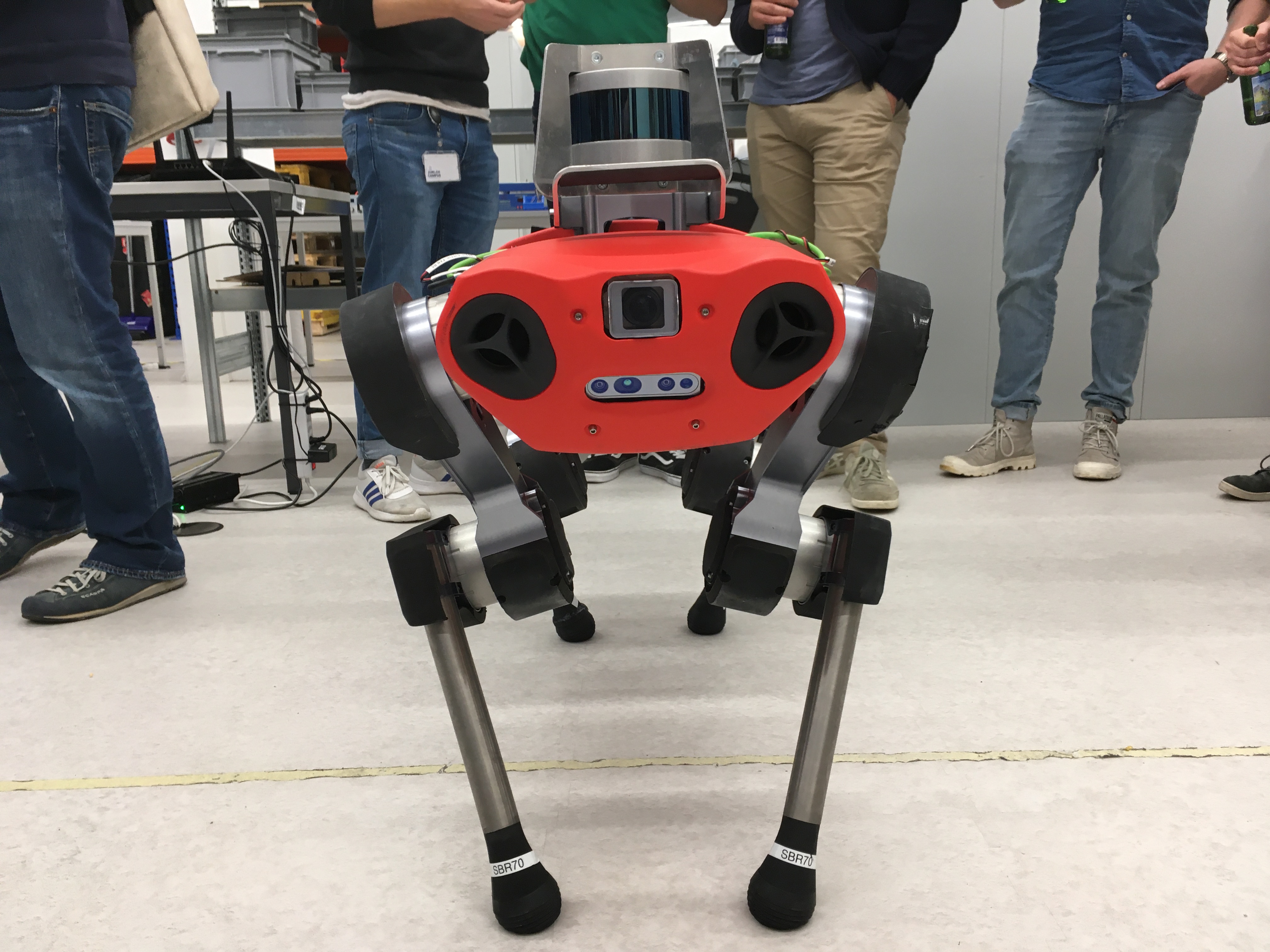
The ANYmal C robot demo was the last part of a meetup, during which the ANYbotics team showed the latest iteration of the robot. The robot was walking, crawling and even dancing to the music. Engineers presented their open-source products, one of the very prominent applications is elevation_mapping package, that helps robot to plan its movements while climbing a stairs. After the interactive part of the demo ANYbotics team took a long time to answer the myriads of questions regarding the technical details of ANYmal robot asked by a meetup attendees.
We would like to thank ANYbotics for hosting and sponsoring this meetup and all of the attendees for coming. Next meetup is yet to be planned. Please follow our meetup group to be up to date with the next event announcements.