ICCLab organized the first robotics and ROS meetup in Zürich on April 9th 2019. There was a good turnout from representatives in both academia and industry, totaling almost 60 people in attendance. This meetup is the first of hopefully many that we intend to organize, as part of our effort to build a local network of ROS users across many robotic disciplines. Besides networking, our goal for these meetups is to also provide a platform for individuals to share and teach specific robotics/ROS knowledge. For this initial meetup we had two presentations: vision for navigation in autonomous robotics, and ROS applications at ICCLab.

Summary of presentation #1: vision for navigation in autonomous robotics by Julian Kent from Auterion
Auterion started their talk with an introduction to navigation algorithms. The example they provided was the A* path-finding algorithm used for obstacle avoidance in many autonomous navigation systems. In the following slides they displayed the complex configuration between non-ROS and ROS components of their drone communication architecture. The presentation ends with a list of advantages and challenges of using ROS in industry, and future steps Auterion intends to take with their drone solution. The complete slideshow can be found here.

Summary of presentation #2: ROS applications at ICCLab by Giovanni Toffetti from ICCLab
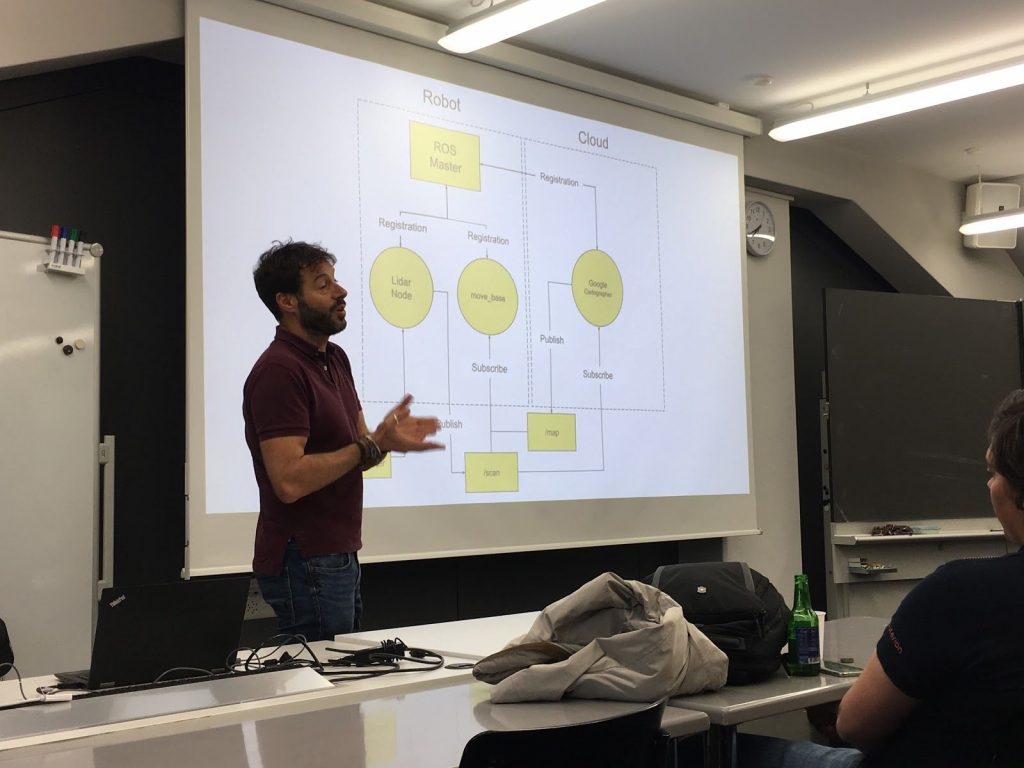
The second talk at the meetup was presented by us and gave a rundown of our current and past ROS/robotics projects. Focus was on our past InnoSuisse project with Rapyuta Robotics which led to the development of an Enterprise Cloud Robotics Platform (ECRP). A live demo using this platform was given at the end of the talk, which showed dynamic orchestration of ROS packages deployed on a TurtleBot2 and on the cloud. A video of the sample application is available at this link. We also discussed our current work in autonomous navigation with a Summit-XL Steel, and arm-control/grasping with a UR5 arm. Slides are here.
Final thoughts
The meetup concluded with networking over some drinks and finger food. Thanks again to Auterion for sponsoring this part of the event.
From both the verbal and written feedback we have received, we are confident in saying that this initial meetup was a success and prompts the continuation of these sort of meetings. All future events and updates can be followed by becoming a member of the Robotics and ROS in Zürich group; the next meetup details have already been released! We look forward to continue meeting ROS-users/roboticists within the area.


