Blogautor: Patrick Gujer
Im Umfang einer Projekt- und Diplomarbeit entwickeln zwei Studenten der School of Engineering der ZHAW an einem kollaborativen Roboter.
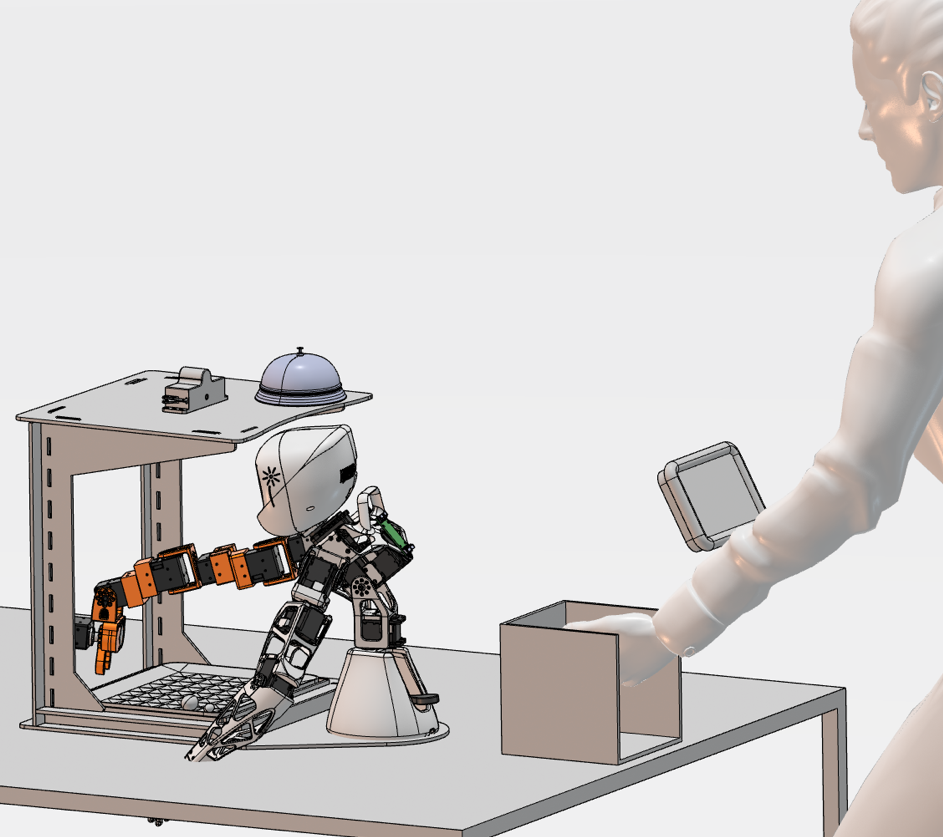
Poppy, der humanoide Roboter der ZHAW als Baukasten in Form eines Digital Twins, bildet für das Studententeam die Grundlage für das Projekt und dient neben der guten Einstiegsmöglichkeit ins Thema Systems Engineering auch als Experimentierplattform für Erweiterungen.
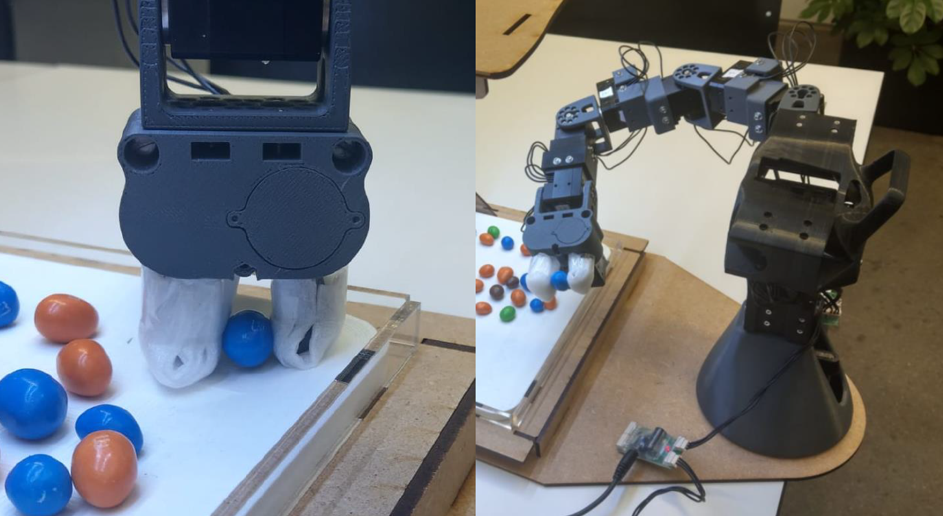
Angefangen mit einer Projektarbeit als Vorstudie für den geplanten intelligenten Greifmechanismus, erarbeiteten die Studenten Teilkomponenten in Bereichen der Steuerungstechnik und Modellierung von physischen Bauteilen. So wurden anhand verschiedener Greifkonzepten, Prototyp-Aufbauten mit Lasercut und 3D-Druck sowie der Verwendung von Vision-Algorithmen mit MATLAB, Ideen und Berechnungen validiert und nach Pflichtenheft für den weiteren Projektverlauf fixiert.
Das Szenario zeichnet nun bis dato die Erkennung von farbigen Objekten, das Berechnen der Bahnkurve des multi-artikulären Greifarms, den Greifmechanismus und das Herausgeben der farbigen Objekte (M&Ms) an den User aus. Softwareseitig kann nun eine Baugruppe kinematisch mit virtuellen Sensoren vollständig simuliert werden. Doch eines ist nun klar: Für die komplette Realisierung einer Erweiterung an einen bereits bestehenden Digital Twin sind interdisziplinäre Teams gefragt, sogar auch schon bei Studentenarbeiten. Inwiefern real-time-Daten zusammengeführt und ausgewertet werden können, hängt von der gesamten Produkt-DNA, sprich dem detaillierten Aufbau mit RFLP im Produktentwicklungsprozess ab.